![]() UPRAVLJANE STEP MOTOROM
UPRAVLJANE STEP MOTOROM
Step motori
nalaze najveću moguću primenu u kompjuterskom upravljanu. Ovi motori se dele u dve
grupe i to: unipolarne i bipolarne step motore. Kod oba tipa motora jedan
dovedeni impuls uzrokuje pomeranje za
jedan korak čija veličina u stepenima zavisi od vrste primenjenog step motora.
Tako su najčešće primenjivani uglovi za rotaciju za 1 korak dati u donjoj
tabeli:
|
Ugao za 1 korak |
Broj koraka za
360° |
|
0.9 |
400 |
|
1.8 |
200 |
|
3.6 |
100 |
|
7.5 |
48 |
|
15 |
24 |
Step motore
karakteriše nisko napajanje kao i mala struja potrošnje. Na donjoj slici je prikazan
presek step motora kao i namotaji za napajanje.

Ovaj motor
se sastoji od rotora proizvedenog od nemagnetnog čelika i statora koji se
sastoj od većeg broja polova. Motor se upravlja tako da se na određeni par
polova dovodi napajanje i koji privlači polarizovane delove rotora. Step motori
mogu da rade u tri različita režima i to:
o
Monofaznom modu
o
Dvofaznom modu
o
Modu polukoraka
Predpostavimo da imamo step motor sa četiri
namotaja. U monofaznom modu za svaki korak dovodi sa napon samo na jedan
namotaj što je dato u donjoj tabeli. Ta sekvenca se ponavlja onoliko puta
koliko želimo da imamo koraka. Budući da se napaja samo jedan namotaj to je i
mali pokretni momenat motora.
|
Korak |
Namotaj 4 |
Namotaj 3 |
Namotaj 2 |
Namotaj 3 |
|
|
a.1 |
1 |
0 |
0 |
0 |
|
|
a.2 |
0 |
1 |
0 |
0 |
|
|
a.3 |
0 |
0 |
1 |
0 |
|
|
a.4 |
0 |
0 |
0 |
1 |
|




U dvofaznom modu napajaju se po
dva namotaja istovremeno. Ovo je i najčešći postupqk koji se primenju jer je
tada i pokretni momenat motora najveći. Ovaj mod je prikazan u donjoj tabeli .
|
Korak |
Namotaj 4 |
Namotaj 3 |
Namotaj 2 |
Namotaj 1 |
|
|
b.1 |
1 |
1 |
0 |
0 |
|
|
b.2 |
0 |
1 |
1 |
0 |
|
|
b.3 |
0 |
0 |
1 |
1 |
|
|
b.4 |
1 |
0 |
0 |
1 |
|




U modu polukoraka
se smenjuje dvofazno sa monofaznim napajanje motora i tako naizmenično. Na ovaj
se način postiže dvostruko veći broj koraka step motora. Međutim njegova je
očigledno glavna mana promenljivi momenat. U donjoj tabeli je prikazan ovaj
način rada.
|
Korak |
Namotaj 4 |
Namotaj 2 |
Namotaj 2 |
Namotaj 1 |
|
|
a.1 |
1 |
0 |
0 |
0 |
|
|
b.1 |
1 |
1 |
0 |
0 |
|
|
a.2 |
0 |
1 |
0 |
0 |
|
|
b.2 |
0 |
1 |
1 |
0 |
|
|
a.3 |
0 |
0 |
1 |
0 |
|
|
b.3 |
0 |
0 |
1 |
1 |
|
|
a.4 |
0 |
0 |
0 |
1 |
|
|
b.4 |
1 |
0 |
0 |
1 |
|
Za eksperimetisanje sa step motorima
je najbolji način da iz starog flopi drajva(5.25") uzmete step motor. Kod
nas su često bili u upotrebi flopi drajvovi sa TEAC step motorom koji je
prikazan na donjoj slici.

Raspored njegovih priključnih vodova
je sledeći:
|
Boja |
Namena |
|
Braon |
Zajed. napajanje |
|
Crvena |
Namotaj 1 |
|
Žuta |
Namotaj 2 |
|
Plava |
Namotaj 3 |
|
Bela |
Namotaj 4 |
Za upravljanje step motorima često se
koristi kolo UNL2003A koje smo mi već opisali. Tipična šema takvog interfejsa
koji se priključuje na paralelni port PC računara data je na donjoj slici.

Takođe se koristi i kolo 5804B firme
Allegro upravo razvijeno za upravljanje step motorima prikazano na donjoj
slici:
Način rada ovog kola za upravljanje
step motorom određuju pinovi 9 i 10 prema sledećoj tabeli:
|
Način rada |
Pin 9 |
Pin 10 |
|
Dvofazni |
L |
L |
|
Monofazni |
H |
L |
|
Polukorak |
L |
H |
|
Zabrana rada |
H |
H |
gde je: L - niski naponski nivo a H -
visoki naponski nivo. Tipična aplikacija sa ovim kolom data je na donjoj slici:
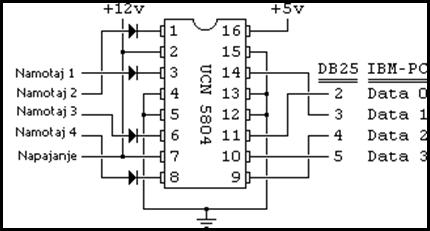
Iz prikazane šeme se vidi da pojedini bitovi
sa Data porta se koriste prema sledećoj tabeli:
|
Bit |
Namena |
|
0 |
Impuls za pokretanje |
|
1 |
Smer okretanja |
|
2 |
Jedn./Dvofazni mod |
|
3 |
Polukor./Puni korak |

http://vojo.milanovic.org
© Copyright, 2004 Milanović Vojo
All Rights Reserved.