![]() PWM UPRAVLJANJE JEDNOSMERNIM MOTOROM
PWM UPRAVLJANJE JEDNOSMERNIM MOTOROM
Preko paralelnog porta moguće je
kontrolisati i brzinu okretanja jednosmernog motora primenom širinski
modulisanog signala(PWM). Šema jednog takvog kola koje to omogućuje data je na
donjoj slici.
Za
realizaciju upravljanja upotrebljeno je
kolo ULN2003A koje u sebi sadrži tranzistore u Darlingtonovom spoju i
imaju ulogu da se na njegovim izlazima direktno upravlja ili vrši pobuda.
Ukupno ima osam izlaza. U ovom interfejsu je upotrebljen
samo jedan i to prvi izlaz. Taj izlaz je direktno spojen na tranzistor BD138
u čiji je kolektorski krug redno vezan
jednosmerni motor. Sam tranzistor BD138 je PNP tranzistor sa
emitorskom strujom oko 1 ampera što je sasvim dovoljno za minijaturan motor
koji je korišćen. Dakle, tranzistor T1 ima
ulogu prekidačkog tranzistora. Na ulaz kola ULN2003A na njegov pin 1 sa strane paralelnog porta PC računara
dovodi se prvi bit iz registra podataka (pin 2). Dovođenje logičke
jedinice(napon od +5 Volti) na
ovaj bit, kolo ULN2003A će ga
proslediti na njegov izlaz (pin 16), a time će biti doveden i napon na bazu
tranzistora T1 zbog čega on prelazi u provodno stanje i pokreće se
elektromotor. Određivanjem dužine trajanja bita određuje se i vreme napajanja
elektromotora.
Za
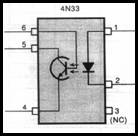
promenu smera elektromotora koristili smo signal AutoFeed koji je u
normalnom stanju na logičkoj jedinici.
Za galvansko odvajanje ovog signala (pin 14) upotrebljen je optokapler 4N33
čija principijalna šema data je na donjoj slici.
PRINCIP UPRAVLJANJA JEDNOSMERNIM
MOTOROM
PRIMENOM ŠIRINSKI MODULISANOG NAPANJA
Princip upravljanja jednosmernim
motor primenom širinski modulisanog napajanja poznatog kao PWM(pulse
with modulation) je široko rasprostranjen pristup. Njegova se suština sastoji u
tome da se motor napaja krakotrajnim impulsima sa jednakom amplitudom pri čemu
mu brzina zavisi od dužine trajanja impulsa. Na donjoj slici prikazan je metod koji je upotrebljen u ovom interfejsu.
Iz
slike se vidi da je vreme trajanja napajanja vremeuk i vreme isključenja
vremeis. Takođe se vidi da je:
ukvre=0.1sek=vremeuk+vremeis
U slučaju ako se vreme
uključenja uvećava, uvećava se i brzina rada motora, a ako se smanjuje onda se
i brzina smanjuje. Kada je vreme isključenja jednako nuli tada motor ima
kontinulano napajanje od 5 volti pa dostiže i maksimalnu brzinu. Ako je vreme uključenja
nula motor ne dobija napajanje pa je zaustavljen. To znači da određivanjem
vremena isključenja i uključenja u okviru jedne desetinke sekunde možemo
regulisati brzinu rada jednosmernog motora sa velikom preciznošću. Još ako se
ta vremena programski određuju preciznost u upravljanju postaje još veća. Na
slici 1 prikazano je napajanje motora kada je vreme trajanja uključenja 2/3
ukupnog vremena a na slici 2 kada je to vreme jednako 1/3 ukupnog vremena.
Slika 1
Slika 2
PCB
izgled pločice i njena montažna šema data je na donjim slikama.
Za izradu ove pločice upotrebljeni su
sledeći elementi:
|
Element |
Količina
|
|
Tranzistor
BD138 |
1 kom |
|
Tranzistor
2N2222 |
1 kom |
|
Kolo ULN2003A |
1 kom |
|
Optokapler 4N33 |
1 kom |
|
Otpornici R1,
R2 - 220 oma |
2 kom |
|
Podnožje
DIL-16 |
1 kom |
|
Podnožje DIL-6 |
1 kom |
|
Rele 5 Volti |
1 kom |
|
Dioda 1N4001 |
1 kom |
|
Redne
stezaljke - dvopolne |
2 kom |
|
Pertinaks
pločica |
1 kom |
|
Konektor DB-25
(muški) sa kućištem |
1 kom |
|
Flet kabal
(trožilni) |
1,5 m |

http://vojo.milanovic.org
© Copyright, 2003 Milanović Voja
All Rights Reserved.